灵活的绳索使配对的机器人能够解决迷宫和收集物品
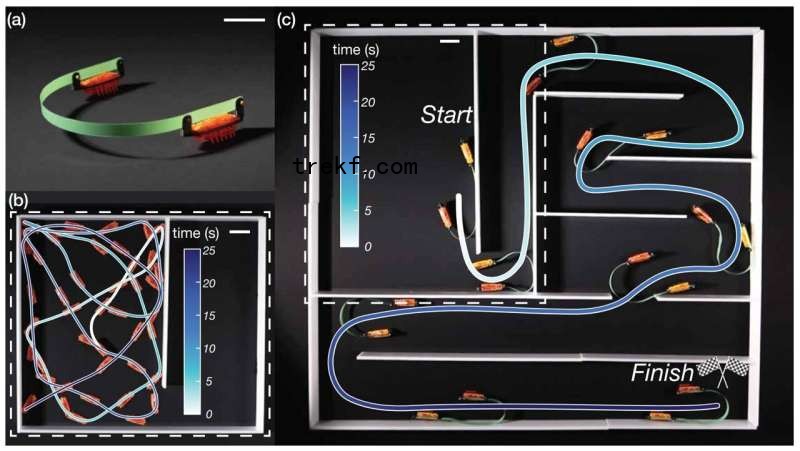
不管它们在哪里,这些玩具机器人会无意识地在桌面上窜来窜去,逗小孩和猫开心。但当普林斯顿大学的工程师们将这些小玩具与一根柔性系绳配对时,这些机器人发展出了非凡的能力。他们探索封闭的空间,轻松地解开迷宫,甚至把松散的物体围成图案。
“我们想用无脑的代理人来启动复杂的行为,”化学和生物工程副教授、研究小组负责人皮埃尔-托马斯·布伦(Pierre-Thomas Brun)说。
在10月29日发表在《美国国家科学院院刊》上的一篇文章中,研究人员说,用一根柔性聚合物绳将机器人连接起来,使两英寸长的机器能够表现出形态计算——一种利用物理特征而不是数字计算来解决复杂问题的现象。
这些发现的意义超出了机器人玩具的有趣用途。科学家们正在寻找控制机器人群的方法,从监视系统到太空探索。在许多情况下,研究人员通过教每个机器人对邻居的简单提示做出反应来组织蜂群,就像鱼群中游动的鱼一样。布朗的团队想要探索是否有可能对一群没有任何计算能力、只对物理输入做出反应的机器人施加控制。
他的团队使用的玩具机器人是一种叫做鬃毛机器人的小型机器人。它们的小而灵活的腿和一个振动的内部马达驱动它们的昆虫运动。这些机器人没有任何类型的计算机控制,而是依靠机械摩擦来指导它们。鬃毛机器人作为玩具广泛销售,它们在科学实验中被用来代替气体颗粒和细菌。
布朗的团队想知道是否有可能在不使用灯光或其他外部指令的情况下创造复杂的行为。他们计划利用机械智能,让物理系统像手抓球一样解决问题。
关键是研究人员用3D打印机制作的一根柔性系绳。他们用刚性的绳子和其他弹性不同的绳子做了实验。研究人员利用摄像机跟踪机器人,建立了数学模型,根据机器人的力量、绳子的长度和灵活性等变量预测配对机器人的行为。
在每一个装置中,研究人员在每个长方形微型机器人的前端都系上一根绳子。用最坚硬的系绳,基本上是一根坚硬的聚酯梁,机器人互相推着,这对机器人几乎不动。但随着研究人员增加聚酯纤维的柔韧性,机器人推绳子时,绳子开始弯曲。
最终,绳子弯曲成u形曲线,让机器人快速向前推进,就像两个游泳者推着面条形浮标的两端一样。连接机器人的绳索通过防止任意一方向随机方向移动来控制这对机器人的方向。(当机器人施加的力超过系绳抗屈曲能力的临界值时,这种控制力就会减弱。)研究人员计算了允许机器人以最快速度在受控方向前进的角度。
在学会控制配对机器人的方向后,研究人员转向障碍物。他们发现,当撞到墙上时,u形的绳子会变平,并导致一对机器人中的一个沿着墙壁快速移动。最后,绳子上的曲线再次出现,但指向不同的方向。这使得这对机器人离开了墙。这一行为允许这对机器人探索一个有限的空间。这也是它们在迷宫中穿行的关键。
除此之外,研究人员还检查了机器人通过开口的能力。他们还开发了使用机器人将桌面上松散的物体分成不同组的方法。
这个项目最初是Richard B. Huang的毕业论文项目。黄于2023年毕业,获得化学和生物工程学位,他说他开始与布朗合作,研究连接在弹性梁上的单个机器人的行为。一天,他用一根绳子把两个机器人连接起来,“打开记录器,看看会发生什么”。
“我放开它,它就在实验装置的墙壁周围移动,”黄说,他现在是麻省理工学院化学工程专业的博士生“我觉得这真的很有趣。就在那时,事情开始变得非常令人兴奋。”
布朗表示,该团队计划继续研究系绳系统。他说,他们希望探索其他的行为和安排与更多的捆绑机器人。另一种可能性是将这项工作应用于在三维空间中移动的无人机。
除了布朗和黄,作者还包括普林斯顿大学化学与生物工程研究生奚宇晨;普林斯顿大学博士后研究员Tom Marzin;特雷弗·琼斯,布朗实验室的前博士生,现在是卡内基梅隆大学机械工程助理教授。该项目的部分支持由美国国家科学基金会提供。
更多资料:奚宇晨等,屈曲驱动弹性主动结构的涌现行为,美国国家科学院院刊(2024)。DOI: 10.1073 / pnas.2410654121。www.pnas.org/doi/10.1073/pnas.2410654121。关于arXiv: DOI: 10.48550/ arXiv .2404.10614期刊信息:美国国家科学院院刊,arXiv由普林斯顿大学提供引文:柔性绳索使配对机器人能够解决迷宫和收集物体(2024,10月31日)从https://techxplore.com/news/2024-10-flexible-tethers-enable-paired-bots.html检索2024年12月28日此文档受版权保护。除为私人学习或研究目的而进行的任何公平交易外,未经书面许可,不得转载任何部分。内容仅供参考之用。